您现在的位置是:首页 >技术教程 >Unity下ML-Agents第一个示例网站首页技术教程
Unity下ML-Agents第一个示例
本文写于2025年2月12日,需要提前安装好Anaconda
一、准备Python端
1.下载并解压 ML-Agents Release 22



解压路径为 C:UsersAdministrator

2.conda虚拟环境创建
conda create -n mlagents22 python=3.10.12 && conda activate mlagents223.执行如下命令
python -m pip config set global.index-url https://mirrors.aliyun.com/pypi/simple //设置镜像源
cd ml-agents-release_22
cd ml-agents-envs
pip install -e . //注意后面的点
cd .. //返回上层目录
cd ml-agents
pip install -e . //注意后面的点
4.安装GPU版torch
cd ..
cd .. //回到ml-agents-release_22根目录
pip3 install torch~=2.2.1 --index-url https://download.pytorch.org/whl/cu121大概率会下载失败,把下载地址复制出来,用迅雷下载
 下载后再执行下面的命令安装
下载后再执行下面的命令安装
pip install C:迅雷下载 orch-2.2.2+cu121-cp310-cp310-win_amd64.whl 5.在ml-agents-release_22config目录下建rollerball_config.yaml
5.在ml-agents-release_22config目录下建rollerball_config.yaml
behaviors:
RollerBallBrain:
trainer_type: ppo
hyperparameters:
batch_size: 64
buffer_size: 2048
learning_rate: 0.0003
beta: 0.005
epsilon: 0.2
lambd: 0.95
num_epoch: 3
network_settings:
normalize: true
hidden_units: 128
num_layers: 2
reward_signals:
extrinsic:
gamma: 0.99
strength: 1.0
max_steps: 500000
time_horizon: 64
summary_freq: 100006.执行如下命令开始训练,这时会生成一个RollerBallBrain.onnx
mlagents-learn config/rollerball_config.yaml --run-id=RollerBall-1根据提示 回到Unity点击Play就会开始训练了,但是Unity这边的工作还没开始。
按Ctrl+C终止执行,请接着往下看。
二、准备Unity端
1.下载的 ML-Agents Release 22中有个Unity工程,位于Project文件夹

打开ProjectSettings/ProjectVersion.txt可以看到Unity版本

安装Unity2023.2.13f1,过程略。
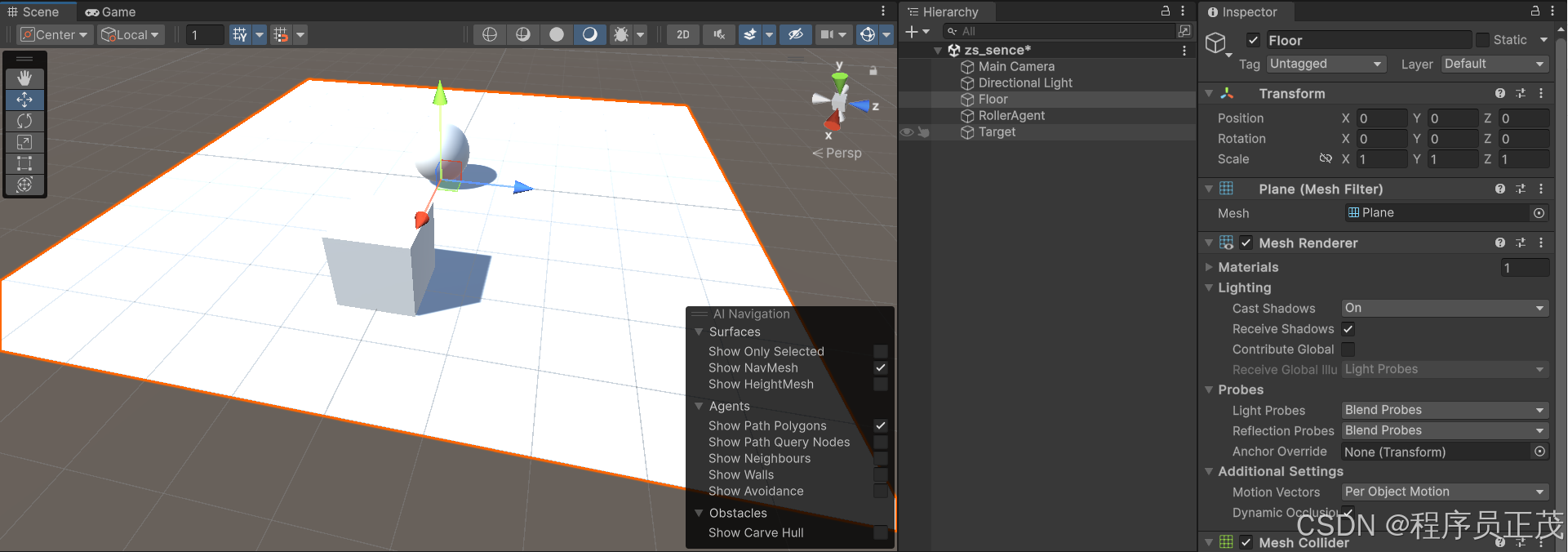
打开工程Project,新建一个场景,创建 一个Plane(命名为Floor),一个方块Cube(Target),一个球Sphere(RollerAgent)(Rotation均为0,0,0,Scale均为1,1,1)
Floor位置:0,0,0
Target位置:3,0.5,0
RollerAgent:0,0.5,0
新建一个脚 本RollerAgent
using Unity.MLAgents;
using Unity.MLAgents.Actuators;
using Unity.MLAgents.Sensors;
using UnityEngine;
public class RollerAgent : Agent
{
[SerializeField]
private Transform Target; // 方块目标
public float speed = 10; // 小球移动速度
private Rigidbody rBody; // 小球刚体
private void Start()
{
// 获取刚体组件
rBody = GetComponent<Rigidbody>();
}
/// <summary>
/// Agent重置:每次训练开始时调用
/// </summary>
public override void OnEpisodeBegin()
{
// 如果小球掉落平台,重置其位置和速度
if (this.transform.position.y < 0)
{
rBody.velocity = Vector3.zero;
rBody.angularVelocity = Vector3.zero;
transform.position = new Vector3(0, 0.5f, 0);
}
// 随机移动目标方块的位置
Target.position = new Vector3(Random.value * 8 - 4, 0.5f, Random.value * 8 - 4);
}
/// <summary>
/// 收集智能体的观察值
/// </summary>
/// <param name="sensor"></param>
public override void CollectObservations(VectorSensor sensor)
{
// 添加目标的位置 (3 个值:x, y, z)
sensor.AddObservation(Target.position);
// 添加小球的位置 (3 个值:x, y, z)
sensor.AddObservation(transform.position);
// 添加小球的速度 (2 个值:x, z,因为 y 方向不需要)
sensor.AddObservation(rBody.velocity.x);
sensor.AddObservation(rBody.velocity.z);
}
public override void OnActionReceived(ActionBuffers actionBuffers)
{
// 获取动作数组:连续动作
var continuousActions = actionBuffers.ContinuousActions;
// 动作控制小球的移动
Vector3 controlSignal = Vector3.zero;
controlSignal.x = continuousActions[0]; // x 轴方向的力
controlSignal.z = continuousActions[1]; // z 轴方向的力
rBody.AddForce(controlSignal * speed);
// 计算小球与目标的距离
float distanceToTarget = Vector3.Distance(transform.position, Target.position);
// 不同情况给奖励
if (distanceToTarget < 1.42f)
{
// 到达目标
SetReward(1.0f);
EndEpisode();
}
if (transform.position.y < 0)
{
// 小球掉落
EndEpisode();
}
}
/// <summary>
/// 手动测试用的动作生成逻辑(启用 Heuristic Only 时调用)
/// </summary>
/// <param name="actionsOut"></param>
public override void Heuristic(in ActionBuffers actionsOut)
{
var continuousActions = actionsOut.ContinuousActions;
continuousActions[0] = Input.GetAxis("Horizontal"); // 左右
continuousActions[1] = Input.GetAxis("Vertical"); // 前后
// 调试信息
Debug.Log($"Heuristic Actions: {continuousActions[0]}, {continuousActions[1]}");
}
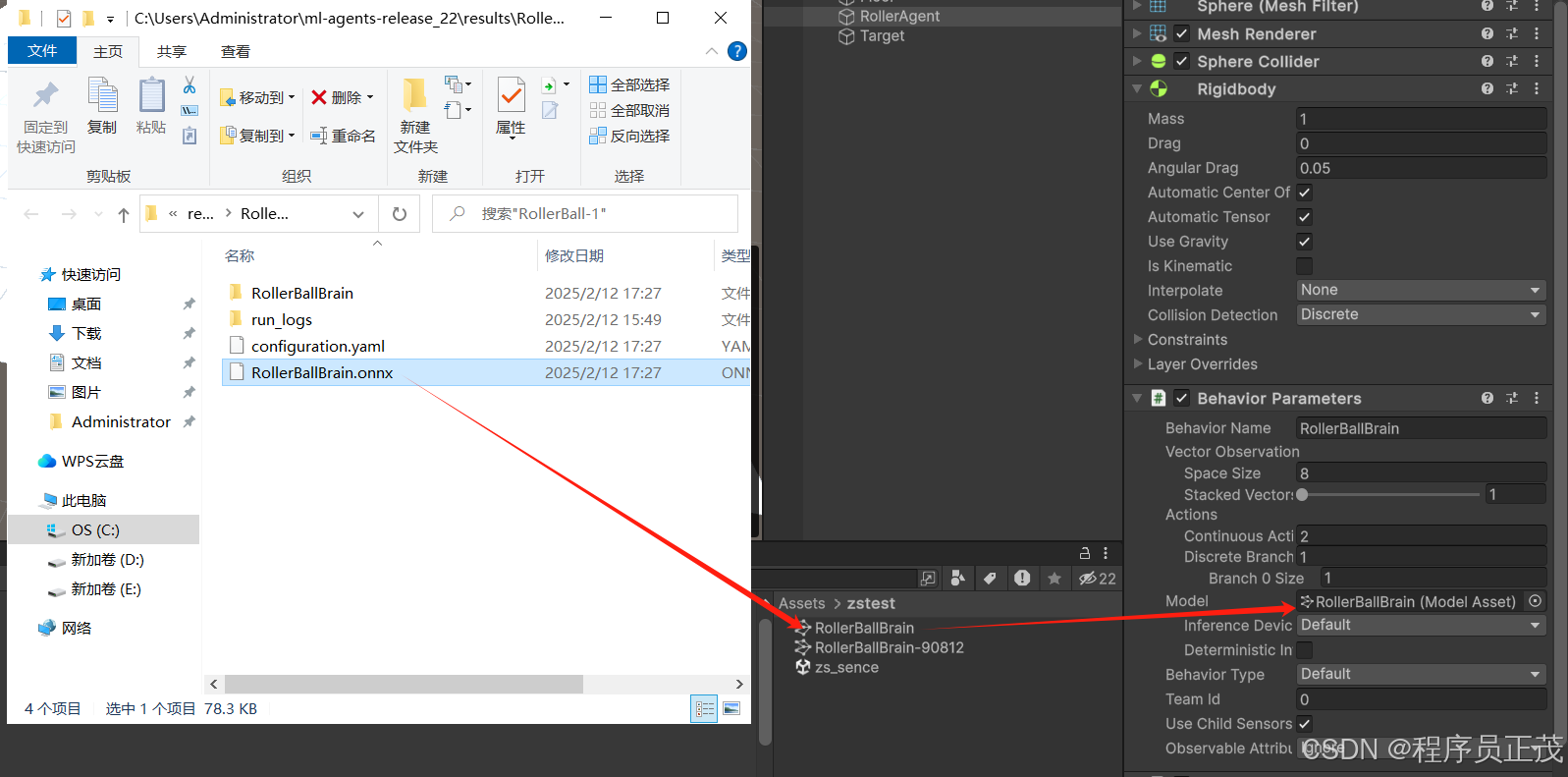
}RollerAgent添加组件Rigidbody、Behavior Parameters、Decision Requester
将python端生成的RollerBallBrain.onnx复制到Unity工作中,Behavior Parameters中的Model先择RollerBallBrain.onnx
三、开始训练
再次执行训练命令
mlagents-learn config/rollerball_config.yaml --run-id=RollerBall-1如果有如下提示
mlagents.trainers.exception.UnityTrainerException: Previous data from this run ID was found.
说明该命令正在提示,执行如下命令恢复执行
mlagents-learn config/rollerball_config.yaml --run-id=RollerBall-1 --resume
当Mean Reward接近1时,就可以按Ctrl+C终止执行。

将RollerBallBrain-90812.onnx复制到Unity,设置到Behavior Parameters的Model中

再次点击Unity的Play,就可以看到小球自动靠近小方块







站长推荐
- QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。
 QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。...
QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。... - U8W/U8W-Mini使用与常见问题解决
 U8W/U8W-Mini使用与常见问题解决
U8W/U8W-Mini使用与常见问题解决 - stm32使用HAL库配置串口中断收发数据(保姆级教程)
 stm32使用HAL库配置串口中断收发数据(保姆级教程)
stm32使用HAL库配置串口中断收发数据(保姆级教程) - 分享几个国内免费的ChatGPT镜像网址(亲测有效)
 分享几个国内免费的ChatGPT镜像网址(亲测有效)
分享几个国内免费的ChatGPT镜像网址(亲测有效) - Allegro16.6差分等长设置及走线总结
 Allegro16.6差分等长设置及走线总结
Allegro16.6差分等长设置及走线总结