不要轻易放弃。学习成长的路上,我们长路漫漫,只因学无止境。 网站首页技术杂谈

SpringBoot中的Javaconfig
JAVA集成Jasypt进行加密、解密(SpringBoot)

基于Java的springboot/SSM+vue.js+uniapp小程序的垃圾分类网站附带文章源码部署视频讲解等

基于Java的springboot/SSM+vue.js+uniapp小程序的线上学习资源智能推荐系统附带文章源码部署视频讲解等
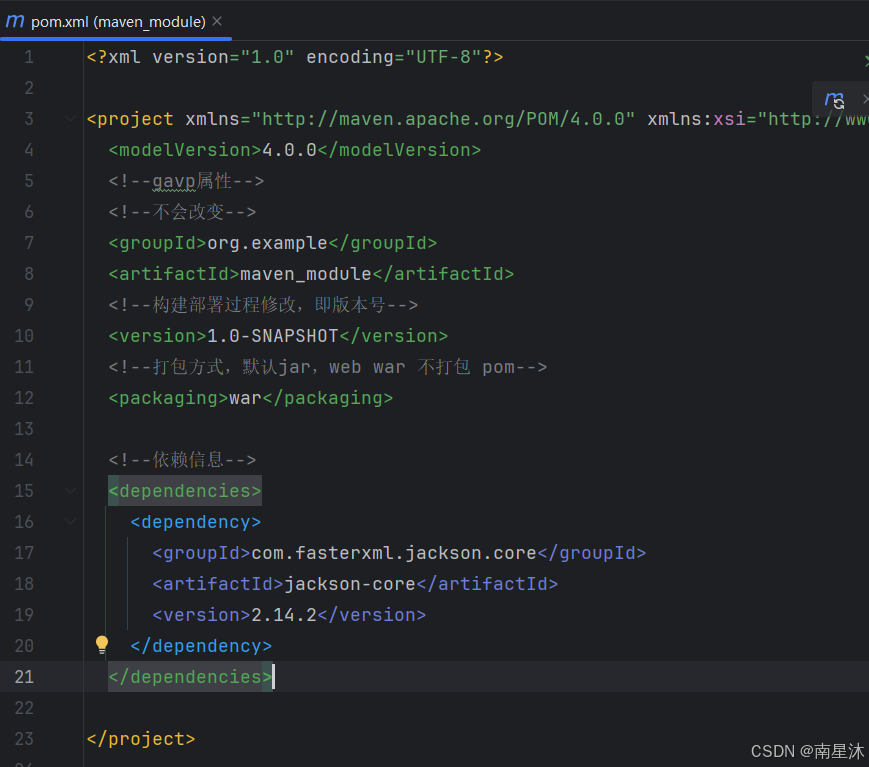
maven核心功能——依赖和构建管理

CodeGPT + IDEA + DeepSeek,在IDEA中引入DeepSeek实现AI智能开发
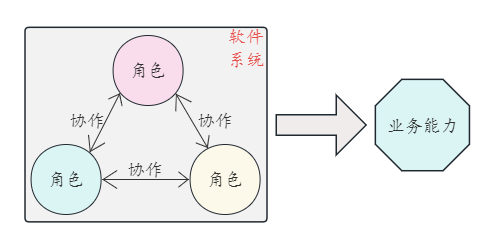
架构技能 专题文章合集

AWS全球加速架构在跨国实时交互系统中的优化实践

Trustzone/TEE标准版-48节课/19.5h

【kubernetes组件合集】深入解析Kubernetes组件之三:client-go





点击排行
-
QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。
 QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。...
QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。... -
若依框架—基于AmazonS3实现OSS对象存储服务
 若依框架—基于AmazonS3实现OSS对象存储服务
若依框架—基于AmazonS3实现OSS对象存储服务 -
U8W/U8W-Mini使用与常见问题解决
 U8W/U8W-Mini使用与常见问题解决
U8W/U8W-Mini使用与常见问题解决 -
stm32使用HAL库配置串口中断收发数据(保姆级教程)
 stm32使用HAL库配置串口中断收发数据(保姆级教程)
stm32使用HAL库配置串口中断收发数据(保姆级教程) -
分享几个国内免费的ChatGPT镜像网址(亲测有效)
 分享几个国内免费的ChatGPT镜像网址(亲测有效)
分享几个国内免费的ChatGPT镜像网址(亲测有效)
站长推荐
- QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。
QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。...
- U8W/U8W-Mini使用与常见问题解决
U8W/U8W-Mini使用与常见问题解决
- stm32使用HAL库配置串口中断收发数据(保姆级教程)
stm32使用HAL库配置串口中断收发数据(保姆级教程)
- 分享几个国内免费的ChatGPT镜像网址(亲测有效)
分享几个国内免费的ChatGPT镜像网址(亲测有效)
- Allegro16.6差分等长设置及走线总结
 Allegro16.6差分等长设置及走线总结
Allegro16.6差分等长设置及走线总结