不要轻易放弃。学习成长的路上,我们长路漫漫,只因学无止境。 网站首页技术杂谈

【论文阅读】BEVNav: Robot Autonomous Navigation ViaSpatial-Temporal Contrastive Learning inBird’s-Eye View

安防机器人电源解决方案
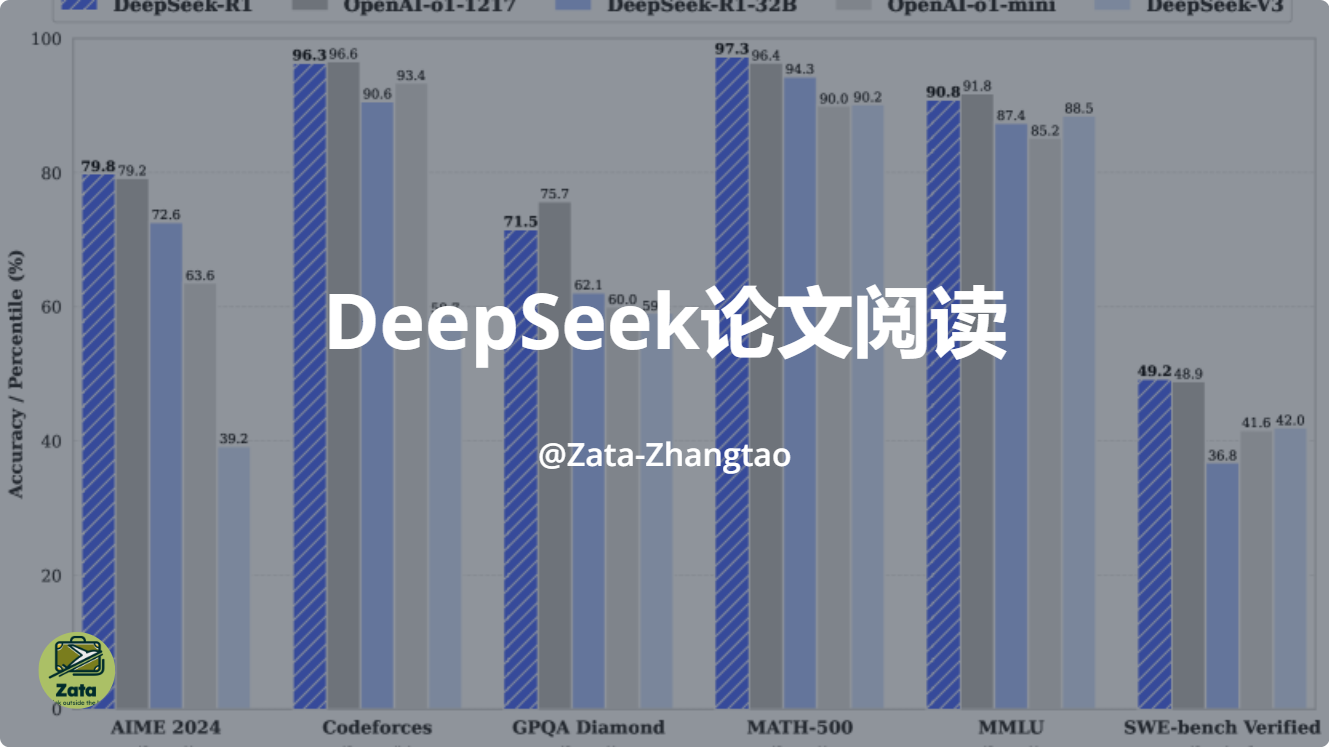
论文阅读:DeepSeek-R1: Incentivizing Reasoning Capability in LLMs via Reinforcement Learning
LabVIEW无人机飞行状态监测系统

从 DeepSeek 爆火,看低代码开发的变革潜力

Hello Robot 推出Stretch 3移动操作机器人,赋能研究与商业应用

无人机遥感在智慧农业信息提取的综合态势,包含:无人机平台的性能、机载传感器指标、地面传感器应用、农林遥感光谱指数、农林光谱建模方法等

UnrealEngine开发无人机飞行模拟软件的手柄如何选择

化工厂危险气体警报机器人——智能系统

深度学习每周学习总结R6(RNN实现阿尔茨海默病诊断)





点击排行
-
QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。
 QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。...
QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。... -
若依框架—基于AmazonS3实现OSS对象存储服务
 若依框架—基于AmazonS3实现OSS对象存储服务
若依框架—基于AmazonS3实现OSS对象存储服务 -
U8W/U8W-Mini使用与常见问题解决
 U8W/U8W-Mini使用与常见问题解决
U8W/U8W-Mini使用与常见问题解决 -
stm32使用HAL库配置串口中断收发数据(保姆级教程)
 stm32使用HAL库配置串口中断收发数据(保姆级教程)
stm32使用HAL库配置串口中断收发数据(保姆级教程) -
分享几个国内免费的ChatGPT镜像网址(亲测有效)
 分享几个国内免费的ChatGPT镜像网址(亲测有效)
分享几个国内免费的ChatGPT镜像网址(亲测有效)
站长推荐
- QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。
QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。...
- U8W/U8W-Mini使用与常见问题解决
U8W/U8W-Mini使用与常见问题解决
- stm32使用HAL库配置串口中断收发数据(保姆级教程)
stm32使用HAL库配置串口中断收发数据(保姆级教程)
- 分享几个国内免费的ChatGPT镜像网址(亲测有效)
分享几个国内免费的ChatGPT镜像网址(亲测有效)
- Allegro16.6差分等长设置及走线总结
 Allegro16.6差分等长设置及走线总结
Allegro16.6差分等长设置及走线总结