不要轻易放弃。学习成长的路上,我们长路漫漫,只因学无止境。 网站首页技术交流

【计基】【SSH无法连接Github】解决ssh链接github超时/拒绝访问(Pycharm Vscode Git 出现此问题都适用)

git clone/push 失败:ssh: connect to host github.com port 22: Connection timed out
ollama + qwen2.5:7b + vscode + 3060显卡部署本地大模型实现ai辅助代码编写

Emacs初探
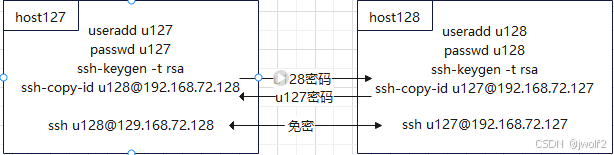
ssh免密登录失效与恢复(.ssh权限被修改可能被攻击等安全问题)

Vue3+codemirror6实现公式(规则)编辑器
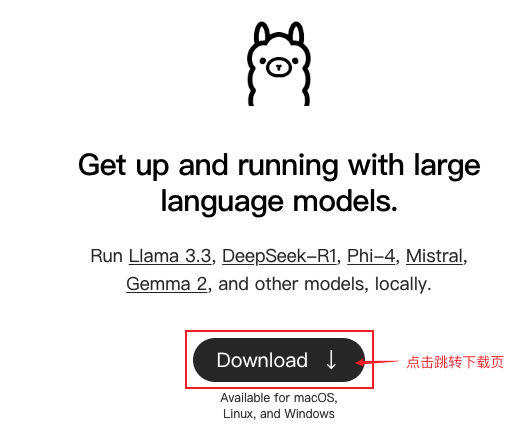
本地部署 deepseek 和 网页访问 及 Vscode或IDEA 协同 Continue 插件 实现自动编码

简化API 工作流程:Apipost整合了 Postman、Swagger 和 JMeter

Github Action自动流翻译README文档【CI/CD】

VSCODE内使用Jupyter模式,运行backtrader不展示图片、图片尺寸无法自定义的处理方案





点击排行
-
QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。
 QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。...
QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。... -
若依框架—基于AmazonS3实现OSS对象存储服务
 若依框架—基于AmazonS3实现OSS对象存储服务
若依框架—基于AmazonS3实现OSS对象存储服务 -
U8W/U8W-Mini使用与常见问题解决
 U8W/U8W-Mini使用与常见问题解决
U8W/U8W-Mini使用与常见问题解决 -
stm32使用HAL库配置串口中断收发数据(保姆级教程)
 stm32使用HAL库配置串口中断收发数据(保姆级教程)
stm32使用HAL库配置串口中断收发数据(保姆级教程) -
分享几个国内免费的ChatGPT镜像网址(亲测有效)
 分享几个国内免费的ChatGPT镜像网址(亲测有效)
分享几个国内免费的ChatGPT镜像网址(亲测有效)
站长推荐
- QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。
QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。...
- U8W/U8W-Mini使用与常见问题解决
U8W/U8W-Mini使用与常见问题解决
- stm32使用HAL库配置串口中断收发数据(保姆级教程)
stm32使用HAL库配置串口中断收发数据(保姆级教程)
- 分享几个国内免费的ChatGPT镜像网址(亲测有效)
分享几个国内免费的ChatGPT镜像网址(亲测有效)
- Allegro16.6差分等长设置及走线总结
 Allegro16.6差分等长设置及走线总结
Allegro16.6差分等长设置及走线总结