您现在的位置是:首页 >学无止境 >合成孔径雷达(SAR)成像之(2)——CS算法点目标成像网站首页学无止境
合成孔径雷达(SAR)成像之(2)——CS算法点目标成像
一、CSA(线性调频变标)的内容
一、CSA的特点:
- 不需要插值操作。
CSA流程:
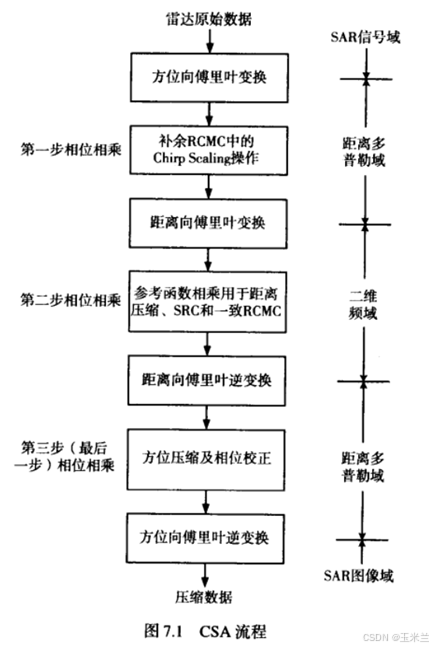
第一步相位相乘(补余RCMC):校正不同距离门的徙动量,使所有徙动一致。(和参考距离处的徙动一样)
第二步相位相乘(一致RCMC):在二维频域校正。
三、CS原理
在匹配滤波时,我们会使用匹配滤波器将信号压缩在距离零频位置,即τ=τa(τa是回波时延)处。若这个压缩压缩到了稍微偏离零频的位置的点,则需要通过插值或者变标实现校正。
这样的偏离有三种:1、常量偏移 ;2、线性偏移;3、非线性偏移。并且这三种偏移都可以使用插值和编标实现。对于常量偏移,变标方程是一次时间项函数;对于线性偏移,变标方程是二次时间项函数。RCMC中的变标可以分为一致RCMC和补余RCMC,对于所有目标来说一致RCMC是相同的,补余RCMC相比一致RCMC小很多,在距离多普勒域的距离R0表达式为:
当参考点选在中心时补余RCMC沿距离向对称。
整体RCMC:目标距离与参考方位距离的差;
![]()
一致RCMC:参考方位处(场景中心)的整体RCMC,如果f=fref则为0,通过距离频域的线性相位相乘实现;
![]()
补余RCMC:整体RCMC减去一致RCMC,参考方位处的补余RCMC为0,如果f=fref则一致也为0,通过变标实现。
![]()
二、代码部分(三点目标)
一、参数设置(参数设置除正侧视外同RD算法相同)
%% 参数设置
Rc=2e+4; %景中心距离
theta=(0/180)*pi; %斜视角
R0=Rc*cos(theta); %最小距离
Vr=150; %平台速度
c=3e+8;
La=3.3;
f0=5.3e+9;
lamda=c/f0;
% 距离向
Fr=6e+7; %距离向采样率%
Kr=2e+13; %距离调频斜率
Tr=2.5e-6; %脉冲宽度
Nr=320;
BW_range = Kr*Tr; % 距离向带宽
tr=(-Nr/2:Nr/2-1)/Fr+2*Rc/c;
fr=(-Nr/2:Nr/2-1)/Nr*Fr;
% 方位向
Fa=200; %方位向采样率
Na=1024; %方位向采样点数
%f_dop=0.886*2*Vr*cos(theta)/La; %多普勒带宽
f_dop=80;
fdop_c=2*Vr*sin(theta)/lamda; %多普勒中心频率
Ta=0.886*lamda*Rc/La/Vr/cos(theta);
%
La_real = 0.886*2*Vr*cos(theta)/f_dop; % 方位向天线长度
beta_bw = 0.886*lamda/La_real; % 雷达3dB波束
La = beta_bw*R0; % 合成孔径长度
%
Ka=f_dop/Ta; %方位向调频斜率
ta=(-Na/2:Na/2-1)/Fa+(-Rc*sin(theta)/Vr);
taa=ta'*ones(1,Nr); %Na*Nr
trr=ones(Na,1)*tr;
%%%%%%%%%%%%%%%%%%%%
fa = fdop_c + fftshift( -Na/2 : Na/2-1 )*(Fa/Na); % 方位频率轴
%%%%%%%%%%%%%%%%%%%%
faa=fa'*ones(1,Nr);
frr=ones(Na,1)*fr;
Ta=0.886*lamda*Rc/La/Vr/cos(theta); %波束的照射时间
R_ref = R0; % 参考目标选在场景中心,其最近斜距为 R_ref
fn_ref = fdop_c; % 参考目标的多普勒中心频率
二、三点目标位置
T1:(R0,0);T2:(R0,120);T3:(R0+80,120);
%% 点目标坐标
delta_R0 = 0; % 将目标1的波束中心穿越时刻,定义为方位向时间零点。
delta_R1 = 120; % 目标1和目标2的方位向距离差,120m
delta_R2 = 80; % 目标2和目标3的距离向距离差,80m
% 目标1(R0,0)
x1 = R0; % 目标1的距离向距离
y1 = delta_R0 + x1*tan(theta); % 目标1的方位向距离
% 目标2(R0,120)
x2 = x1; % 目标2和目标1的距离向距离相同
y2 = y1 + delta_R1; % 目标2的方位向距离
% 目标3(R0+80,120)
x3 = x2 + delta_R2; % 目标3和目标2有距离向的距离差,为delta_R2
y3 = y2 + delta_R2*tan(theta); % 目标3的方位向距离
% 坐标
x_r = [x1,x2,x3];
y_a = [y1,y2,y3];
% 波束中心穿越时刻
nc_1 = (y1-x1*tan(theta))/Vr; % 目标1的波束中心穿越时刻。
nc_2 = (y2-x2*tan(theta))/Vr; % 目标2的波束中心穿越时刻。
nc_3 = (y3-x3*tan(theta))/Vr; % 目标3的波束中心穿越时刻。
nc_target = [nc_1,nc_2,nc_3]; % 定义该数组,便于处理。
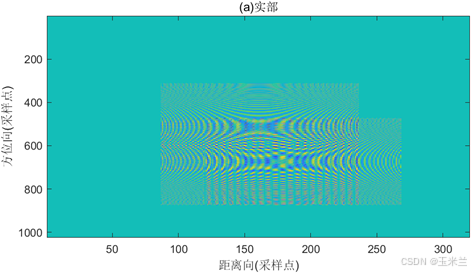
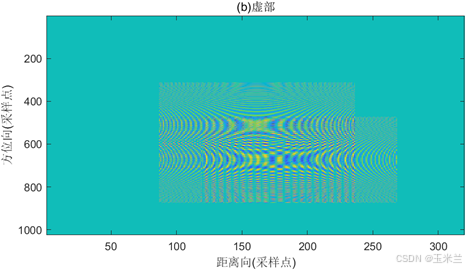
图1. 回波信号
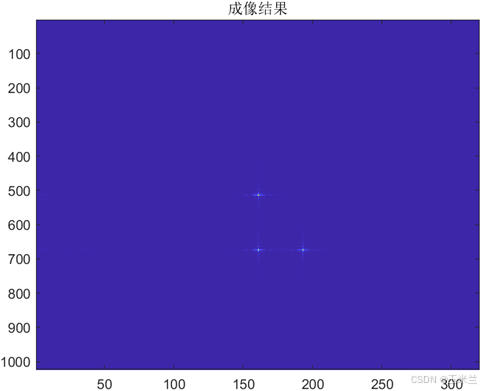
图2. 成像结果
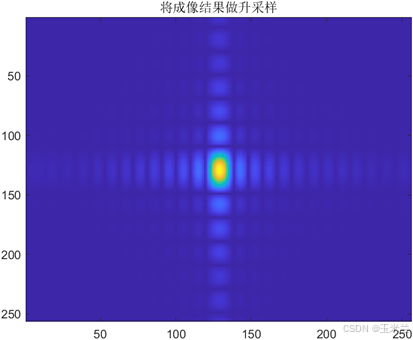
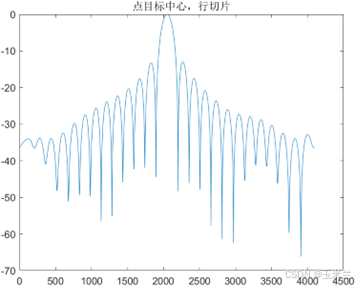
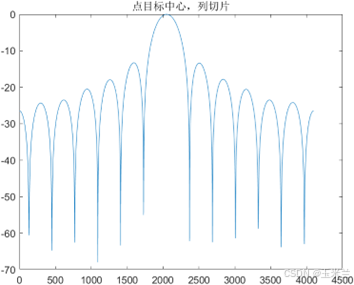
图3. 点目标剖析
输出信号最大目标:
行切片(距离向)
| PSLR | ISLR | IRW |
| -12.8603 | -9.8903 | 2.6673 |
列切边(方位向)
| PSLR | ISLR | IRW |
| -13.2376 | -10.4906 | 1.6631 |






站长推荐
- QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。
 QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。...
QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。... - U8W/U8W-Mini使用与常见问题解决
 U8W/U8W-Mini使用与常见问题解决
U8W/U8W-Mini使用与常见问题解决 - stm32使用HAL库配置串口中断收发数据(保姆级教程)
 stm32使用HAL库配置串口中断收发数据(保姆级教程)
stm32使用HAL库配置串口中断收发数据(保姆级教程) - 分享几个国内免费的ChatGPT镜像网址(亲测有效)
 分享几个国内免费的ChatGPT镜像网址(亲测有效)
分享几个国内免费的ChatGPT镜像网址(亲测有效) - Allegro16.6差分等长设置及走线总结
 Allegro16.6差分等长设置及走线总结
Allegro16.6差分等长设置及走线总结