您现在的位置是:首页 >技术交流 >探索图的遍历方式:深度优先遍历与宽度优先遍历网站首页技术交流
探索图的遍历方式:深度优先遍历与宽度优先遍历
引言
在图论中,图的遍历是一个基础而重要的问题。遍历图的过程可以理解为访问图中的每一个顶点,并确保每个顶点都被访问且仅被访问一次。深度优先遍历(Depth-First Search, DFS)和宽度优先遍历(Breadth-First Search, BFS)是两种最常用的图遍历方式。它们在解决图的连通性、路径查找、拓扑排序等问题中有着广泛的应用。本文将详细介绍这两种遍历方式的基本思想、实现方法、应用场景以及它们之间的对比。
背景知识
图的基本概念
- 图(Graph):由顶点(Vertex)和边(Edge)组成的结构,可以表示为 G = ( V , E ) G = (V, E) G=(V,E),其中 V V V 是顶点集, E E E 是边集。
- 有向图与无向图:边是否有方向性。
- 连通图:图中任意两个顶点之间都存在路径。
- 树(Tree):一种特殊的图,具有以下性质:
- 连通且无环。
- 有 n n n 个顶点和 n − 1 n-1 n−1 条边。
遍历的意义
图的遍历是解决许多图论问题的基础,例如:
- 判断图的连通性。
- 寻找图中的路径或环。
- 拓扑排序。
- 求解最小生成树或最短路径。
深度优先遍历(DFS)
基本思想
深度优先遍历的核心思想是“一条路走到黑”。从起始顶点出发,沿着一条路径尽可能深入地访问顶点,直到无法继续为止,然后回溯到上一个顶点,继续探索其他路径。
算法步骤
- 初始化:选择一个起始顶点,标记为已访问。
- 递归探索:从当前顶点出发,访问一个未被访问的邻接顶点,并递归地进行深度优先遍历。
- 回溯:当当前顶点的所有邻接顶点都被访问后,回溯到上一个顶点。
伪代码
def dfs(graph, start, visited):
visited[start] = True # 标记当前顶点为已访问
print(start) # 访问当前顶点
for neighbor in graph[start]: # 遍历当前顶点的邻接顶点
if not visited[neighbor]:
dfs(graph, neighbor, visited) # 递归访问邻接顶点
实现细节
- 递归实现:利用函数调用栈实现回溯。
- 非递归实现:使用栈模拟递归过程。
应用场景
- 连通性检测:判断图是否连通。
- 拓扑排序:用于有向无环图(DAG)的拓扑排序。
- 寻找路径:查找两个顶点之间的路径。
宽度优先遍历(BFS)
基本思想
宽度优先遍历的核心思想是“逐层扩展”。从起始顶点出发,先访问其所有邻接顶点,然后再依次访问这些邻接顶点的邻接顶点,直到所有顶点都被访问。
算法步骤
- 初始化:选择一个起始顶点,标记为已访问,并将其加入队列。
- 逐层访问:从队列中取出一个顶点,访问其所有未被访问的邻接顶点,并将它们加入队列。
- 重复:重复步骤2,直到队列为空。
伪代码
from collections import deque
def bfs(graph, start):
visited = [False] * len(graph) # 初始化访问标记
queue = deque([start]) # 初始化队列
visited[start] = True # 标记起始顶点为已访问
while queue:
vertex = queue.popleft() # 取出队列中的顶点
print(vertex) # 访问当前顶点
for neighbor in graph[vertex]: # 遍历当前顶点的邻接顶点
if not visited[neighbor]:
visited[neighbor] = True # 标记邻接顶点为已访问
queue.append(neighbor) # 将邻接顶点加入队列
实现细节
- 队列的使用:利用队列的先进先出(FIFO)特性实现逐层访问。
应用场景
- 最短路径:在无权图中求解最短路径。
- 连通性检测:判断图是否连通。
- 层级遍历:按层级访问树或图的顶点。
DFS与BFS的对比
1. 遍历顺序
- DFS:沿着一条路径尽可能深入地访问顶点,直到无法继续为止,然后回溯。
- BFS:逐层访问顶点,先访问离起始顶点最近的顶点。
2. 数据结构
- DFS:使用栈(递归调用栈或显式栈)。
- BFS:使用队列。
3. 时间复杂度
- DFS: O ( V + E ) O(V + E) O(V+E),其中 V V V 是顶点数, E E E 是边数。
- BFS: O ( V + E ) O(V + E) O(V+E),与DFS相同。
4. 空间复杂度
- DFS:取决于递归深度,最坏情况下为 O ( V ) O(V) O(V)。
- BFS:取决于队列大小,最坏情况下为 O ( V ) O(V) O(V)。
5. 适用场景
- DFS:适合寻找路径、拓扑排序、连通性检测等问题。
- BFS:适合求解最短路径、层级遍历等问题。
代码实现
DFS的实现
给定一棵树,树中包含 n n n 个结点(编号 1 ∼ n 1 sim n 1∼n)和 n − 1 n-1 n−1 条无向边。要求找到树的重心,并输出将重心删除后,剩余各个连通块中点数的最大值。
重心定义:重心是指树中的一个结点,如果将这个点删除后,剩余各个连通块中点数的最大值最小,那么这个节点被称为树的重心。
输入格式
- 第一行包含整数 n n n,表示树的结点数。
- 接下来 n − 1 n-1 n−1 行,每行包含两个整数 a a a 和 b b b,表示点 a a a 和点 b b b 之间存在一条边。
输出格式
- 输出一个整数 m m m,表示将重心删除后,剩余各个连通块中点数的最大值。
解题思路
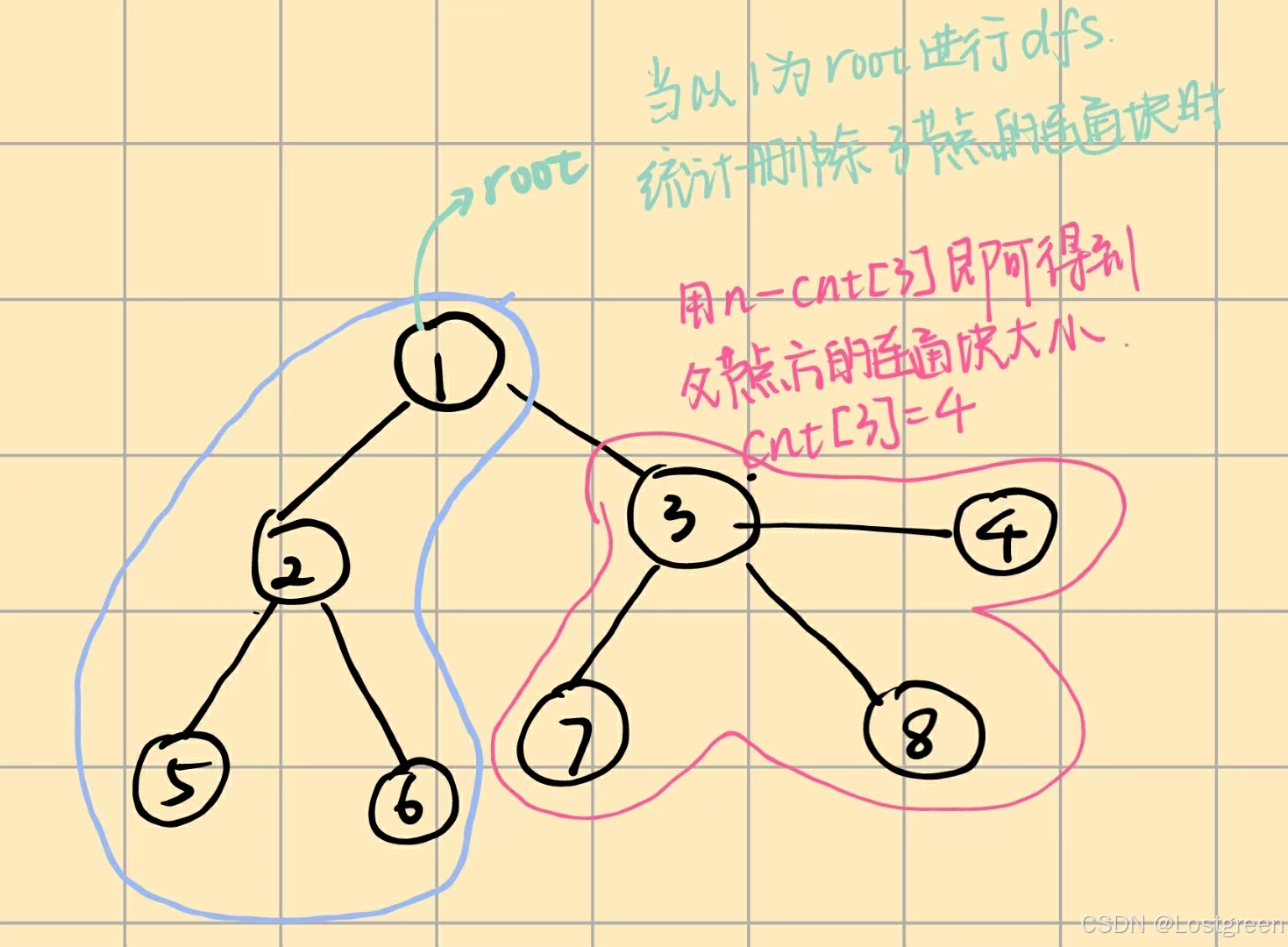
我们可以通过深度优先搜索(DFS)遍历树,计算每个结点作为重心时的最大连通块大小,最终选择最小的最大值对应的结点作为重心。
具体步骤如下:
- DFS遍历:从任意一个结点(如根结点)开始,递归遍历树的每个结点。
- 计算子树大小:对于每个结点,计算其子树的大小,并记录删除该结点后,剩余连通块的最大值。
- 更新重心:在遍历过程中,记录最小的最大值对应的结点。
关键代码:对于非子节点的连通块,可以用总节点数减去当前连通块个数来实现计算。
3. 代码实现
以下是基于DFS的树的重心问题的代码实现:
#include <iostream>
#include <cstring>
using namespace std;
const int MAX_NODES = 2e5 + 7; // 定义最大节点数
// 邻接表存储树的相关数组
int head[MAX_NODES], targetNode[MAX_NODES], nextEdge[MAX_NODES], edgeIndex = 0;
// cnt[node] 表示以 node 为根的子树大小
// blockSize[node] 表示删除 node 后的最大连通块大小
int subtreeSize[MAX_NODES], blockSize[MAX_NODES];
int nodeCount; // 树的节点数
/**
* 添加一条无向边到邻接表中
* @param fromNode 起始节点
* @param toNode 目标节点
*/
void addEdge(int fromNode, int toNode) {
nextEdge[++edgeIndex] = head[fromNode];
head[fromNode] = edgeIndex;
targetNode[edgeIndex] = toNode;
}
/**
* 深度优先搜索(DFS)遍历树,计算每个节点的子树大小和删除该节点后最大的连通块大小
* @param currentNode 当前处理的节点
* @param parent 当前节点的父节点
* @return 返回以当前节点为根的子树大小
*/
int depthFirstSearch(int currentNode, int parent) {
for (int i = head[currentNode]; i != -1; i = nextEdge[i]) {
int childNode = targetNode[i];
if (childNode == parent) continue; // 避免重复访问父节点
int childSubtreeSize = depthFirstSearch(childNode, currentNode); // 递归计算子树大小
blockSize[currentNode] = max(blockSize[currentNode], childSubtreeSize); // 更新删除当前节点后的最大连通块大小
subtreeSize[currentNode] += childSubtreeSize; // 累加子树大小
}
subtreeSize[currentNode] += 1; // 包括当前节点本身
blockSize[currentNode] = max(blockSize[currentNode], nodeCount - subtreeSize[currentNode]); // 更新删除当前节点后的最大连通块大小
return subtreeSize[currentNode]; // 返回以当前节点为根的子树大小
}
int main() {
ios::sync_with_stdio(false); // 提高I/O效率
cin.tie(0);
cout.tie(0);
cin >> nodeCount;
memset(head, -1, sizeof head); // 初始化邻接表
// 输入 n-1 条边,构建无向图
for (int i = 1; i < nodeCount; ++i) {
int nodeX, nodeY;
cin >> nodeX >> nodeY;
addEdge(nodeX, nodeY); // 添加无向边
addEdge(nodeY, nodeX);
}
depthFirstSearch(1, -1); // 从节点 1 开始 DFS
int minBlockSize = 1e6; // 初始化最小最大连通块大小
for (int i = 1; i <= nodeCount; ++i) {
if (blockSize[i] < minBlockSize) {
minBlockSize = blockSize[i]; // 更新最小最大连通块大小
}
}
cout << minBlockSize << endl; // 输出结果
return 0;
}
BFS的实现
#include <iostream>
#include <queue>
#include <cstring>
using namespace std;
const int MAX_NODES = 1e5 + 7; // 定义最大节点数
// 邻接表相关变量
int head[MAX_NODES], targetNode[MAX_NODES], nextEdge[MAX_NODES], edgeIndex = 0;
// 距离数组,初始化为一个很大的值表示无穷大
int distanceToNode[MAX_NODES];
/**
* 添加边到邻接表中
* @param fromNode 起始节点
* @param toNode 目标节点
*/
void addEdge(int fromNode, int toNode) {
// 将新边插入链表头部
nextEdge[++edgeIndex] = head[fromNode];
head[fromNode] = edgeIndex;
targetNode[edgeIndex] = toNode;
}
/**
* 使用广度优先搜索计算从起点到终点的最短路径长度
* @param startNode 起点
* @param endNode 终点
*/
void breadthFirstSearch(int startNode, int endNode) {
// 初始化所有节点的距离为无穷大
memset(distanceToNode, 0x3f, sizeof distanceToNode);
queue<int> nodeQueue;
distanceToNode[startNode] = 0; // 起点到自身的距离为0
nodeQueue.push(startNode);
while (!nodeQueue.empty()) {
int currentNode = nodeQueue.front();
nodeQueue.pop();
// 遍历当前节点的所有邻接节点
for (int i = head[currentNode]; i != -1; i = nextEdge[i]) {
if (distanceToNode[targetNode[i]] == 0x3f3f3f3f) { // 如果该节点尚未访问过
distanceToNode[targetNode[i]] = distanceToNode[currentNode] + 1; // 更新距离
nodeQueue.push(targetNode[i]); // 将该节点加入队列
}
}
}
// 输出结果:如果终点不可达,则输出-1;否则输出到达终点的最短距离
if (distanceToNode[endNode] == 0x3f3f3f3f)
cout << -1 << endl;
else
cout << distanceToNode[endNode] << endl;
}
int main() {
ios::sync_with_stdio(false); // 提高I/O效率
cin.tie(0);
cout.tie(0);
int nodeCount, edgeCount;
cin >> nodeCount >> edgeCount;
memset(head, -1, sizeof head); // 初始化head数组为-1,表示没有边
// 输入每条边的信息,并调用addEdge函数将其添加到邻接表中
for (int i = 1; i <= edgeCount; ++i) {
int fromNode, toNode;
cin >> fromNode >> toNode;
addEdge(fromNode, toNode);
}
// 执行BFS算法,从节点1开始寻找到达最后一个节点的最短路径
breadthFirstSearch(1, nodeCount);
return 0;
}
结论
深度优先遍历(DFS)和宽度优先遍历(BFS)是图论中最基础的两种遍历方式,它们各有特点,适用于不同的场景。DFS适合解决路径查找、拓扑排序等问题,而BFS适合解决最短路径、层级遍历等问题。理解这两种遍历方式的原理和实现方法,是掌握图论算法的重要基础。






站长推荐
- QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。
 QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。...
QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。... - U8W/U8W-Mini使用与常见问题解决
 U8W/U8W-Mini使用与常见问题解决
U8W/U8W-Mini使用与常见问题解决 - stm32使用HAL库配置串口中断收发数据(保姆级教程)
 stm32使用HAL库配置串口中断收发数据(保姆级教程)
stm32使用HAL库配置串口中断收发数据(保姆级教程) - 分享几个国内免费的ChatGPT镜像网址(亲测有效)
 分享几个国内免费的ChatGPT镜像网址(亲测有效)
分享几个国内免费的ChatGPT镜像网址(亲测有效) - Allegro16.6差分等长设置及走线总结
 Allegro16.6差分等长设置及走线总结
Allegro16.6差分等长设置及走线总结